Het Kennis Instituut voor Mobiliteitsbeleid (KIM) heeft de brochure uitgebracht ‘Chauffeur aan het stuur?’ (okt 2015, http://www.kimnet.nl/publicatie/chauffeur-aan-het-stuur ) over zelfrijdende auto’s. Het Rathenau-instituut heeft in okt. 2014 gepubliceerd “Tem de robotauto” ( https://www.rathenau.nl/nl/publicatie/het-bericht-tem-de-robotauto-0 ).
De Rathenau-brochure gaat vooral op de techniek in, die van het KIM vooral op de maatschappelijke implicaties.
Mijn betrokkenheid
Ik verplaats mij bijna uitsluitend per fiets of OV. De autobranche wordt niet rijk aan mij.
Toch heb ik redenen om geïnteresseerd te zijn in het onderwerp.
Ik zit in de kerngroep van het Platform NOC (“De Ruit” om Eindhoven). Die gaat niet door, maar onze argumentatie leunde mede op het overbodig maken van nieuw asfalt door het bestaande beter te benutten. In praktijk betekent dat een verbetering van de N279 binnen het kader van 2*1 en 80 km/uur bij goede inpassing, een capaciteitsoplossing op de A58 en een veiligheidsoplossing op de A67.
Vanuit Milieudefensie ben ik geïnteresseerd in een betere luchtkwaliteit en dus in moderne verkeersontwikkelingen in stedelijk gebied.
Iedere staatsburger is geïnteresseerd in meer verkeersveiligheid en minder brandstofverbruik.
Al deze vraagstukken hebben raakvlakken met de zelfrijdende auto.

Definities
Het Rathenau-instituut onderscheidt twee soorten zelfrijdende auto’s:
– de robotauto zoals die van Google, die wel op Internet zit maar niet met de omgeving praat
– de coöperatieve auto zoals die in Europa ontwikkeld wordt (welke research voor een belangrijk deel op de Automotive Campus in Helmond plaatsvindt).
De robotauto is niet relevant voor het drukke Europese wegennet. Hij vraagt te veel ruimte om zich heen.
Met de nieuwe Tesla is de eerste zelfsturende coöperatieve auto op ons wegennet toegelaten.

Auto’s zijn te plaatsen op een spectrum met aan de ene kant oude auto’s met niets extra’s, via een continuüm aan steeds verdergaande vormen van rijtaakondersteuning tot een grotendeels zelfrijdende auto.
Cruise Control is inmiddels een bekend begrip. Als auto’s onderling hun afstand registreren en handhaven, en verkeersinformatie doorgeven, heet dat ‘adaptief(A)’. Als auto’s reageren op informatie van langs de wegkant heet dat ‘coöperatief(C)’. De combinatie van beide (CCAC) mondt uiteindelijk uit in (bijna) zelfstandig rijden.
Het adaptieve model werkt vooral ‘bottom-up’, het tweede meer ‘top-down’. De kunst is dit op een goede manier samen te brengen.
Nederland heeft hier een vooraanstaande positie.
De KIM-scenario’s
Het KIM heeft scenario’s ontwikkeld om in te schatten welke invloed de autotechniek op de inrichting van onze maatschappij kan hebben. Voor de duidelijkheid: een scenario is geen prognose, maar een denkoefening!
Het KIM ordent tweedimensionaal.
Op de ene as wordt de haalbare automatisering beschreven. Bij kengetal 1 en 2 monitort de mens de omgeving, bij 3,4 en monitort het systeem de omgeving. Het KIM werkt met 3 (voorwaardelijke) tot 5 (volledige) automatisering.
Op de andere as staat de bereidheid van de mens om zijn auto te delen. Auto’s staan namelijk meestal ongebruikt stil. In die tijd zou men ze beschikbaar kunnen stellen aan anderen, met een range tussen ener-
zijds hooguit je familie (laag) en anderzijds iedereen (hoog).
Zo ontstaan vier scenario’s.
scenario 1: 5/hoog “Mobility as a service: any time, any place’
scenario 2: 5/laag “Fully automated private luxury”
scenario 3: 3,4/laag “Letting go on highways”
scenario 4: 3,4/hoog “Multimodal and shared automation”
Dat leidt tot het volgende verzamelstaatje:
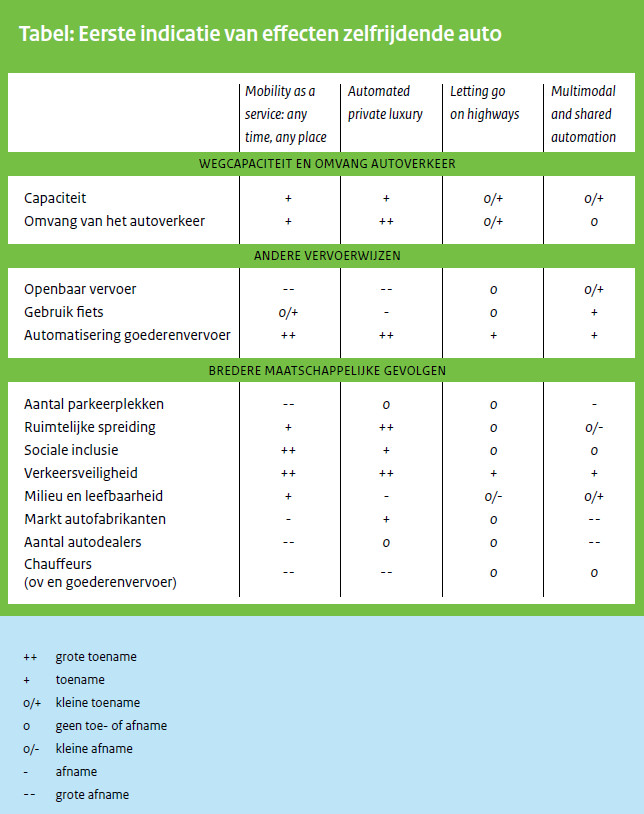
De vraagstelling is ook tweedimensionaal, namelijk hoe waarschijnlijk en hoe wenselijk elk scenario is.
Over de waarschijnlijkheid durf ik weinig te zeggen. Ik doe alleen aan helderziendheid als ik er niet onderuit kan en er wordt mij nu geen besluit gevraagd. Laat ik het erbij houden dat ik een sceptisch mens ben en niet bij voorbaat overtuigd van het welslagen van automatiserings-
projecten en de niet-hack-baarheid van systemen. Als ik gedwongen word mijn geld erop in te zetten, schat ik in dat automatiseringslevel 3 en 4 zich al beginnen aan te dienen, en dat van level 5 nog moet blijken of dat gebeurt en zo ja, wanneer. De Tesla op de TV werd op de snelweg gedemonstreerd en je moest je handen aan het stuur houden. Dat lijkt mij level 3.
Hoe bereid de Nederlander blijkt om zijn auto te delen is vooralsnog onduidelijk. Tot nu toe is die gestegen van praktisch nul naar een klein beetje. Mogelijk denkt de jeugd daar anders over.
Ik wil in elk geval niet aan jan en alleman mijn fiets uitlenen.
Het scenario ‘automated private luxury’ vind ik in elk geval onwenselijk. Dat heeft vooral nadelen: het autoverkeer stijgt sterker dan de wegcapaciteit, het OV krijgt de nekslag en leefbaarheid en milieu (die vooral gedefinieerd zijn in de steden) worden slechter.
Het laatste scenario is eigenlijk een superversie van wat je met het huidige systeem zou willen: er is geen nieuw asfalt nodig, treintje rijden op de snelweg kan, andere vervoerswijzen worden zinvol gecombineerd, er wordt naar behoefte gedeeld, er wordt minder brandstof verbruikt (en dus minder gif in de lucht geloosd), er blijft vervoer mogelijk op het platteland en er staan minder auto’s in de stad. En de mens wordt niet volledig van de computer afhankelijk. Eigenlijk heel mooi.
Laat ik het voorlopig maar eens op het laatste scenario houden.